ííííÙSÍ°║¢╠ý╝╝ðg(sh¿┤)Á─░l(f¿í)ı╣��ú¼║¢╠ýã¸┐é¾wîª(du¿¼)═ã▀M(j¿¼n)äË(d¿░ng)┴ª¤Á¢y(t¿»ng)Á─ðÈ─▄Í©ÿ╦(bi¿ío)ʬþÊ▓È¢üÝ(l¿ói)È¢©▀���ú¼╚þʬþ═ã▀M(j¿¼n)¤Á¢y(t¿»ng)¥▀ËðÍÏ┴┐¦p�����íó┘A¤õë║┴ªÁ═��íó═ã┴ª╩Ê╩Êë║©▀╝░ÊÎÂÓ┤╬ãäË(d¿░ng)Á╚��ú╗Å─¤Á¢y(t¿»ng)ÍÏ┴┐�����íó¢Y(ji¿ª)ÿï(g¿░u)│▀┤þ����íó░▓╚½ðÈ╝░┐╔┐┐ðÈÁ╚¢ÃÂ╚┐╝æ]�ú¼▓╔Ë├│úÊÄ(gu¿®)Á─öDë║╩¢╗‗▒├ë║╩¢═ã▀M(j¿¼n)¤Á¢y(t¿»ng)Â╝ÙyÊÈØM(m¿ún)ÎÒ¤Óæ¬(y¿®ng)Á─Í©ÿ╦(bi¿ío)ʬþí���ú╗¯╚¹▒├È÷ë║═ã▀M(j¿¼n)¤Á¢y(t¿»ng)╩âÚË┌│úÊÄ(gu¿®)öDë║╩¢┼c▒├ë║╩¢═ã▀M(j¿¼n)¤Á¢y(t¿»ng)Í«ÚgÁ─Ê╗ÀNð┬ð══ã▀M(j¿¼n)¤Á¢y(t¿»ng)���íú┼c£u¦å▒├È÷ë║¤Á¢y(t¿»ng)¤Ó▒╚ú¼ãõÍÏ┴┐¦p��íó¢Y(ji¿ª)ÿï(g¿░u)║å(ji¿ún)å╬íó╣ñθ┐╔┐┐╝░ƒo(w¿▓)ãäË(d¿░ng)┤╬öÁ(sh¿┤)¤ÌÍã����ú╗┼cöDë║╩¢¤Á¢y(t¿»ng)¤Ó▒╚ú¼È┌40 kN ═ã┴ªÊȤ┬��ú¼Ë╔Ë┌┘A¤õë║┴ªÁ═���íó═ã┴ª╩Ê╩Êë║©▀��ú¼ÃÊ▓╗ðÞʬ©▀ë║ÜÔã┐Á╚ÐbÍ├�����ú¼È┌¤Á¢y(t¿»ng)┘|(zh¿¼)┴┐À¢├µı╝ËðÊ╗¿â×(y¿¡u)ä¦(sh¿¼)����í�ú╗¯╚¹▒├θ×ÚÈôð┬ð══ã▀M(j¿¼n)¤Á¢y(t¿»ng)Á─║╦ð─▓┐╝■Í«Ê╗ú¼ãõÐðÍã╣ñθ╝┤│╔×ÚÈôð═¤Á¢y(t¿»ng)ÐðÍãÁ─ÛP(gu¿ín)µI¡h(hu¿ón)╣Ø(ji¿ª)�íú─┐Ã░ú¼╩└¢þ╔¤âHËð├└ç°(gu¿«)║═ק┐╦╠m│╔╣ªÐðÍã┴╦Ê║¾w╗╝²░l(f¿í)äË(d¿░ng)ÖC(j¿®)╗¯╚¹▒├����ú¼▓ó▀_(d¿ó)Á¢┴╦æ¬(y¿®ng)Ë├ÙAÂ╬����íúË╔Ë┌Èô¤Á¢y(t¿»ng)¥▀Ëð©▀ðÈ─▄�����íó¦p┘|(zh¿¼)╗»��íóðíð═╗»Á╚ØôÈ┌â×(y¿¡u)³c(di¿ún)�����ú¼ßÿîª(du¿¼)╬Êç°(gu¿«)«ö(d¿íng)Ã░║¢╠ý╝╝ðg(sh¿┤)░l(f¿í)ı╣┼cæ¬(y¿®ng)Ë├ðÞþ���ú¼╝▒ðÞÚ_(k¿íi)ı╣Ê║¾w╗╝²░l(f¿í)äË(d¿░ng)ÖC(j¿®)╗¯╚¹▒├Á─╠¢╦¸Ðð¥┐╣ñθíú
íííí╗¯╚¹▒├╩Ã▓╔Ë├╚½ÜÔäË(d¿░ng)ÖC(j¿®)ðÁÚ]¡h(hu¿ón)┐ÏÍãüÝ(l¿ói)îì(sh¿¬)¼F(xi¿ñn)ÂÓ©Î▀B└m(x¿┤)¢╗╠µäË(d¿░ng)θÁ─����ú¼ãõ╣ñθ┐╔┐┐ðÈ╚íøQË┌╚½ÜÔäË(d¿░ng)ÖC(j¿®)ðÁÚ]¡h(hu¿ón)┐ÏÍã╗Ï┬ÀÁ─┐╔┐┐ðÈíúÈ┌Ã░ã┌╠¢╦¸ÐðÍãÍð│÷¼F(xi¿ñn)┴╦ÎȵiÁ─╣╩ı¤─ú╩¢����ú¼╝┤╗¯╚¹▒├ÂÓ©Î╗ѵiú¼×Ú┴╦ÀÍ╬÷È¡Ê‗�íó╠ß│÷©─▀M(j¿¼n)�ú¼ıµ┐ı╝╝ðg(sh¿┤)¥W(w¿úng)(http://www.chvacuum.com/)░l(f¿í)▓╝┤╦╬─îóîª(du¿¼)╗¯╚¹▒├┐ÏÍãÜÔ┬À▀M(j¿¼n)ðð▀ë¦ï╠ÏðÈÀÍ╬÷�íú
íííí1íó╗¯╚¹▒├╣ñθȡ└Ý
íííí╗¯╚¹▒├͸ʬË╔Ê║©Î����íóÍ╣╗ÏÚyíóÜÔ©Î�����íó┐ÏÍãÚy╝░îº(d¿úo)╣▄▀B¢Ë╝■Á╚¢M│╔�ú¼╚þêD1 ╦¨╩¥íúãõ╣ñθȡ└Ý╚þ¤┬ú║╗¯╚¹▒├╣ñθÃ░�ú¼È┌Ê║┬À╚Ù┐┌ë║┴ªÁ─θË├¤┬ú¼▀M(j¿¼n)Ê║Í╣╗ÏÚy┤‗Ú_(k¿íi)��ú¼═ã▀M(j¿¼n)ä®╠¯ØM(m¿ún)4 éÇ(g¿¿)Ê║©Î��íúÜÔ┬À╣®ÊÈ©▀ë║ÜÔ¾w▓ó┤‗Ú_(k¿íi)¤┬Ë╬┼┼Ê║┐ÏÍãÚy║¾�����ú¼╗¯╚¹▒├▒ÒÍ▓¢Ð¡¡h(hu¿ón)╣ñθ�����íúË╔Ë┌ôQ¤‗ÚyA ║═C ×Ú│úÚ_(k¿íi)¢Y(ji¿ª)ÿï(g¿░u)ú¼╣╩┼cãõ¤Ó▀BÁ─ÜÔ©ÎA ║═C ╩Τ╚▀M(j¿¼n)ÜÔ�����ú¼©▀ë║ÜÔ¾w═ãäË(d¿░ng)╗¯╚¹A ║═C ▀M(j¿¼n)╚Ù┼┼Ê║ø_│╠��ú¼Ê║©ÎA ║═C┼┼│÷©▀ë║Ê║¾w���íú═¼òr(sh¿¬)ú¼Ê╗▓┐ÀÍÜÔ¾w¢ø(j¿®ng)╗¼ÚyC ▀M(j¿¼n)╚ÙôQ¤‗ÚyB ║═D Á─┐ÏÍãÃ╗╩Ê����ú¼╩╣ãõ▀M(j¿¼n)ÜÔÚy┐┌ÛP(gu¿ín)Ú]íú«ö(d¿íng)╗¯╚¹A ║═C ▀\(y¿┤n)äË(d¿░ng)Í┴ðð│╠Â╦▓┐òr(sh¿¬)����ú¼╗¼ÚyC ôQ¤‗ú¼ôQ¤‗ÚyB ║═D ┐ÏÍãÃ╗╩Êâ╚(n¿¿i)Á─ÜÔ¾wÅ─╗¼Úy┐┌┼┼│÷�����ú¼ôQ¤‗ÚyB ║═D ôQ¤‗����ú¼ãõ▀M(j¿¼n)ÜÔÚy┐┌┤‗Ú_(k¿íi)����ú¼©▀ë║ÜÔ¾w▀M(j¿¼n)╚ÙÜÔ©ÎB ║═D��ú¼╝┤°═ãäË(d¿░ng)╗¯╚¹B ║═D ▀M(j¿¼n)╚Ù┼┼Ê║ø_│╠�íú═¼òr(sh¿¬)ú¼Ê╗▓┐ÀÍÜÔ¾w¢ø(j¿®ng)╗¼ÚyD ▀M(j¿¼n)╚ÙôQ¤‗ÚyA ║═C Á─┐ÏÍãÃ╗╩Ê�ú¼Úyð¥ôQ¤‗ú¼▀M(j¿¼n)ÜÔÚy┐┌ÛP(gu¿ín)Ú]��íó┼┼ÜÔÚy┐┌┤‗Ú_(k¿íi)�ú¼ÜÔ©ÎA ║═C Ú_(k¿íi)╩╝┼┼ÜÔú¼«ö(d¿íng)ÜÔ©ÎA║═C ÍðÁ─ë║┴ª¢ÁÁ═Í┴Ê╗¿ÍÁòr(sh¿¬)�ú¼È┌Ê║¾w▀M(j¿¼n)┐┌ë║┴ªÎ¸Ë├¤┬▀M(j¿¼n)╚Ù│õÊ║╗Ï│╠íú«ö(d¿íng)╗¯╚¹B ║═D ▀\(y¿┤n)äË(d¿░ng)Í┴ðð│╠Â╦▓┐òr(sh¿¬)�ú¼ËÍò■(hu¿¼)▀M(j¿¼n)╚Ù═¼ÿËÁ─ôQ¤‗▀^(gu¿░)│╠ú¼╚þ┤╦¢╗╠µ╣ñθ����ú¼îì(sh¿¬)¼F(xi¿ñn)▀B└m(x¿┤)┼┼Ê║íú
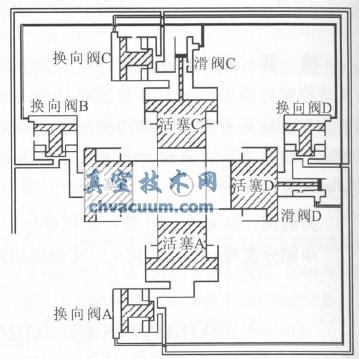
êD1 ╗¯╚¹▒├È¡└ÝêD
íííí2���íó┴¸¾w▀ë¦ï└Ýıô║å(ji¿ún)¢Ú
íííí┴¸¾w▀ë¦ï└Ýıô╩ÃÐð¥┐╚þ║╬îó┴¸¾w┐ÏÍãȬ╝■¤Ó╗Ñ▀B¢ËãüÝ(l¿ói)ÊÈØM(m¿ún)ÎÒ¢o¿Á─▀ë¦ïʬþ�ú¼▀_(d¿ó)Á¢ÎÈäË(d¿░ng)┐ÏÍ㩸ÀNÖC(j¿®)ðÁ¢Y(ji¿ª)ÿï(g¿░u)Á──┐Á─ú¼▀@¥═╩Ã╦¨Í^Á─┴¸¾w▀ë¦ïÈO(sh¿¿)Ëï(j¿¼)��ú╗┴Ý═Ô����ú¼Ê▓┐╔ÊÈË├Ë┌┴¸¾wȬ╝■Á─╣ª─▄ÎR(sh¿¬)äe║═‗×(y¿ñn)ÎCÊÐÈO(sh¿¿)Ëï(j¿¼)│÷Á─┴¸¾w┐ÏÍã¤Á¢y(t¿»ng)À¢░©Á─┐╔ðððÈíú╦³Á─╗¨ÁA(ch¿│)└Ýıô¾w¤ÁüÝ(l¿ói)È┤Ë┌▀ë¦ïöÁ(sh¿┤)îW(xu¿ª)�����ú¼Ê‗┤╦┴¸¾w▀ë¦ï¥═╩Ã└¹Ë├▀ë¦ï║»öÁ(sh¿┤)ËðÊÄ(gu¿®)ätÁÏ▒Ý╩¥▀ë¦ïʬþÁ─Ê╗ÀNÀ¢À¿��ú¼┴¸¾w▀ë¦ïåû(w¿¿n)¯}Á─¢ÔøQ͸ʬÊ└┘ç(l¿ñi)Ë┌▓╝áû┤·öÁ(sh¿┤)����íú
íííí2.1�����íó┴¸¾w▀ë¦ï├Þ╩÷
íííí▀ë¦ïÈO(sh¿¿)Ëï(j¿¼)║═ÀÍ╬÷╩Τ╚ʬ╠ß│÷¯A(y¿┤)ã┌Á─ÖC(j¿®)ã¸▓┘θ│╠ð‗��ú¼ÃÕ╬·ÁÏ├Þ╩÷È┌╝ñ░l(f¿í)├┐éÇ(g¿¿)¦ö│÷Í«Ã░Á─ùl╝■���íúË╔Ë┌╔µ╝░╗Ï┬ÀÁ─Å═(f¿┤)ÙsðÈ���ú¼Ë├üÝ(l¿ói)├Þ╩÷▀ë¦ï¤Á¢y(t¿»ng)ʬþÁ─©±╩¢┐╔─▄ò■(hu¿¼)Ëðð®Îâ╗»�����íú╚╗°����ú¼È┌©¸ÀNÃÚør¤┬����ú¼ƒo(w¿▓)ıô──ÀN├Þ╩÷À¢À¿Â╝▒ÏÝÜ¢¿┴ó¦ö│÷ð┼╠û(h¿ño)▀ë¦ï│╠ð‗íúîª(du¿¼)Ë┌¢M║¤▀ë¦ï╗Ï┬ÀüÝ(l¿ói)ıf(shu¿¡)�����ú¼ãõ├Þ╩÷©±╩¢┐╔─▄ʬ▒╚òr(sh¿¬)ð‗ð═¤Á¢y(t¿»ng)║å(ji¿ún)å╬Á─ÂÓ�����ú¼─┐Ã░͸ʬ├Þ╩÷À¢À¿Ëðú║ıµÍÁ▒Ý�����íóòr(sh¿¬)Úg▒Ý(¥Ç(xi¿ñn)á¯êD▒Ý)����íó¥C║¤╣ñð‗▒Ý�����íóÈ¡╩╝┴¸äË(d¿░ng)▒Ý�íóá¯æB(t¿ñi)¥ÏÛç�����íó¥C║¤▒Ý╝░▀ë¦ïʬþ▒ÝÁ╚����íú
íííí2.2íó┴¸¾w▀ë¦ïÈO(sh¿¿)Ëï(j¿¼)
íííí×Ú┴╦ð╬│╔ØM(m¿ún)ÎÒ¯A(y¿┤)¿ʬþÁ─¤Á¢y(t¿»ng)¥W(w¿úng)¢j(lu¿░)°▀xô±║═▀B¢Ë▀ë¦ïȬ╝■Á─▀^(gu¿░)│╠ÀQ(ch¿Ñng)×Ú▀ë¦ïÈO(sh¿¿)Ëï(j¿¼)�íúîª(du¿¼)Ë┌¢M║¤▀ë¦ï¥W(w¿úng)¢j(lu¿░)ú¼Ê╗░Ò▓╔Ë├ıµÍÁ▒Ý╗‗┐¿ÍZêD¥═ÎÒë‗┴╦�ú¼Ê‗?y¿ñn)Ú╦³éâ┐╔ÊÈ╠ß╣®¤Óî?du¿¼)Ë┌©¸ÀN¦ö╚Ù¢M║¤Á─¦ö│÷╬¿Ê╗├Þ╩÷ú¼Á├│÷¥W(w¿úng)¢j(lu¿░)Á─║å(ji¿ún)╗»¦ö│÷À¢│╠(ÀÂ╩¢)��ú¼¥═┐╔ÊÈ▀xô±¤Óæ¬(y¿®ng)Á─▀ë¦ïȬ╝■üÝ(l¿ói)┤¯¢¿▀ë¦ï¥W(w¿úng)¢j(lu¿░)���ú╗°òr(sh¿¬)ð‗▀ë¦ï¥W(w¿úng)¢j(lu¿░)ú¼Ê‗?y¿ñn)Ú¥W(w¿úng)¢j(lu¿░)ÍððÞʬʲ╚Ù┴╦“ËøæøȬ╝■”��ú¼▀@ÿË¥W(w¿úng)¢j(lu¿░)¥═│÷¼F(xi¿ñn)┴╦“á¯æB(t¿ñi)”ú¼Ê▓¥═ʲ╚Ù┴╦á¯æB(t¿ñi)┴¸äË(d¿░ng)��íóá¯æB(t¿ñi)Á╚âr(ji¿ñ)╝░á¯æB(t¿ñi)╠µôQÁ╚åû(w¿¿n)¯}����ú¼╣╩ÈO(sh¿¿)Ëï(j¿¼)▀^(gu¿░)│╠ʬÅ═(f¿┤)ÙsÁ├ÂÓíú─┐Ã░��ú¼┴¸¾w▀ë¦ïÈO(sh¿¿)Ëï(j¿¼)Á─͸ʬÀ¢À¿Ëðú║Ê╗░Ò¢ÔÀ¿��íóίðí╗»À¢À¿(ƒo(w¿▓)ÛP(gu¿ín)Ýù(xi¿ñng)Á─└¹Ë├�����íóþÐa(b¿│)║å(ji¿ún)╗»À¿�íó╣½Ê‗ÎË╠ß╚íÀ¿╝░╚½─▄▀ë¦ïȬ╝■Á─└¹Ë├)íó¢ø(j¿®ng)Áõ¥C║¤À¿(á¯æB(t¿ñi)Á╚âr(ji¿ñ)����íóá¯æB(t¿ñi)╠µôQíó▀\(y¿┤n)äË(d¿░ng)┴¸äË(d¿░ng)▒Ý��íó╝ñä¯(l¿¼)▒Ý╝░╝ñä¯(l¿¼)êD) ╝░Àâø(j¿®ng)Áõ¥C║¤À¿(Îâð┼╠û(h¿ño)À¿�����íó╚½ð┼╠û(h¿ño)À¿íóá¯æB(t¿ñi)¥ÏÛçÀ¿���íóÌD(zhu¿ún)ôQ▒ÝÀ¿╝░á¯æB(t¿ñi)êDÀ¿) Á╚�����íú
íííí2.3�íó┴¸¾w▀ë¦ïÀÍ╬÷
ííííÈ┌║▄ÂÓÃÚør¤┬���ú¼┴¸¾w┐ÏÍã╗Ï┬ÀÁ─ÈO(sh¿¿)Ëï(j¿¼)▓╔Ë├Í▒Ë^(gu¿ín)═ã└ÝÁ─À¢À¿���ú¼Ê└┐┐ÈO(sh¿¿)Ëï(j¿¼)ı▀Á─¢ø(j¿®ng)‗×(y¿ñn)üÝ(l¿ói)═Û│╔íúÁ½▀@ÿËÎ÷╚▒Àª▀ë¦ï¥C║¤Á─╗¨ÁA(ch¿│)�ú¼Ê╗Á®┴¸¾w┐ÏÍã╗Ï┬ÀÈO(sh¿¿)Ëï(j¿¼)│÷üÝ(l¿ói)ú¼ÙxÚ_(k¿íi)┴╦ÈO(sh¿¿)Ëï(j¿¼)ı▀ʬ¤ÙîñıÊ╣╩ı¤���íó©─┴╝¤Á¢y(t¿»ng)¥═┐╔─▄║▄Ùy¤┬╩Í��íú┴¸¾w▀ë¦ïÀÍ╬÷Á──┐Á─¥═È┌Ë┌à^(q¿▒)ÀÍ▓óÐð¥┐╗Ï┬ÀÁ─©¸éÇ(g¿¿)Ȭ╝■����ú¼┤_¿Ȭ╝■Á─║»öÁ(sh¿┤)ÛP(gu¿ín)¤Á╩¢║═¤Á¢y(t¿»ng)Á─ı¹╠ÎÛP(gu¿ín)¤Á╩¢╩ÃÀ±Ëð─▄┴ªØM(m¿ún)ÎÒ╦¨├Þ╩÷Á─▀ë¦ïʬþ��ú¼┐╔ÊÈ‗×(y¿ñn)ÎC▀ë¦ï¤Á¢y(t¿»ng)Á─ı²┤_ðÈ����ú¼Ê▓┐╔ÊÈ¢Ê╩¥╣╩ı¤Á─È¡Ê‗


